令和6年1月11日(木)12日(金)に福島県南相馬市福島ロボットテストフィールドと宮城県丸森町阿武隈川堤防,1月16日(火)塩竈市桂島市道において, AI搭載自動走行地中レーダロボットの走行実験を総合工学科の園田潤教授と学生6名(専攻科情報電子システム専攻2年増田楓真君,中道一紗君,東海林瑠玖君,本科総合工学科福島萌香さん,加藤泰人君,三國裕倫君)で実施しました。
AI搭載地中レーダロボットは,園田教授が文部科学省の科学研究費補助金・基盤研究(B)令和5年度採択「災害捜索やインフラ点検を刷新する人手不要な3DイメージングAI地中レーダの創出」や,令和5年度内閣府みちびきを利用した実証事業「みちびきCLASにより高精度で自動走行するインフラ点検用地中レーダロボットの開発」で研究しているもので,AIやロボットを用いて地中レーダを全自動化・高度化するものです。
今回実験した自動走行地中レーダロボットは,日本の測位衛星「みちびき」のセンチメータ級測位補強サービス(CLAS)により高精度に自動走行するものです。実験では,福島ロボットテストフィールド市街地フィールド(道路)や土砂傾斜フィールド(斜面),また丸森町や塩竈市桂島の実際の河川堤防や道路において地中レーダロボットの自動走行実験を実施しました。自動走行地中レーダロボットが実現できれば,少子高齢化社会で労働人口が減少するなかインフラ点検の省力化等が実現でき,安全安心社会の高度化が期待できます。
実験の結果,CLASを用いることで平均4.3 cm 最大16 cmの精度で自動走行でき,地中の埋設管位置を誤差13 cm程度で検出できました。また,河川堤防では地中のもぐら等によると考えられる空洞を検出できました。さらに桂島市道での実験では,気温氷点下でのロボット動作や凍結積雪した斜面での走行が確認でき,市道に設置された埋設管を検出できました。この結果は,2024年1月に名取市文化会館で開催される電子情報通信学会研究会宇宙・航空エレクトロニクス研究会や2024年3月に広島大学で開催される電子情報通信学会総合大会で発表予定です。
最後に今回の実験にあたり福島ロボットテストフィールド,塩竈市役所,宮城県警察塩釜警察署,塩竈市桂島区長内海様ほか多くの方々に調整等いただきましたこと感謝申し上げます。
内閣府みちびきを使用した実証事業
https://qzss.go.jp/ex-demo/
科学研究費補助金採択課題概要
https://kaken.nii.ac.jp/ja/grant/KAKENHI-PROJECT-23H01650/
 |
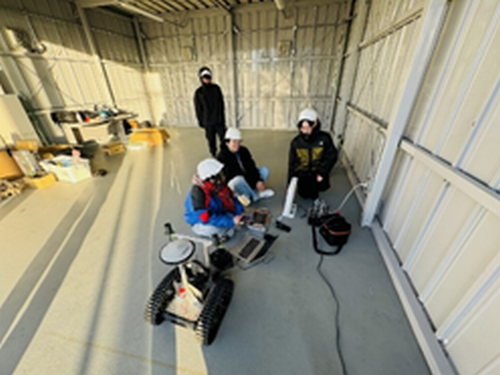 |
| 実験の様子1 | 実験の様子2 |
 |
 |
| 実験の様子3 | 実験の様子4 |